Hello all,
I have been out of things for nearly two years due to building an observatory with dome and associated driver software using the ASCOM Dome template. I am field testing the dome at present and in general it seems to work well in tests with POTH so last night I tested with SGP and obtained slightly different results.
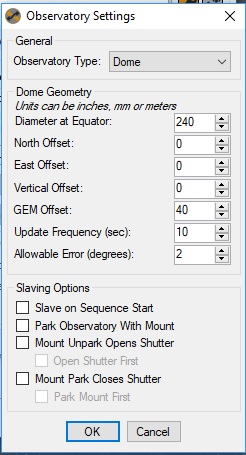
I have described below the process I followed and pasted in a screenshot of my dome settings, also link to log file.
The equipment I use is:
Celestron C11
Sitech Controller with MESU 200 Mount
PHD2 latest version
SBIG camera
SGP
Process
set up an LRGB sequence for NGC4565
Connect the equipment including the Dome, but slave Dome not checked at this point
Align the dome slit with the scope (by looking from behind scope)
Blind solve to sync the mount
Slew to target (NGC4565)
Manually align the dome slit once more
Centre now
Start PHD2 guiding
At this point I am ready to start the sequence, so I noted the telescope azimuth, which is provided by the Sitech controller interface and set my Dome encoder (reads in degrees from 0 to 360) to be the same as the scope azimuth, this value was 210 degrees.
In the SGP control panel, I ticked ‘Slave to telescope’
So at this point, in my head, I’ve got everything aligned, one more look from behind the scope to see that it is aligned with the dome slit and then I started the sequence.
The dome stepper motor MCU then received a request for a move to Azimuth 189 and moved the dome there. So at this point, the scope is looking at azimuth 210 and the dome has moved to Azimuth 189.
In order to continue and check if the dome would track the scope, I temporarily held the encoder at 189 and realigned the dome slit so that the scope and slit were aligned. There was some fiddling then to get guiding restarted, the good news is that the dome driver software received and responded to SGP’s Azimuth requests. At the end of the session, the Sitech controller was reporting the scope azimuth as 239 and the last request the dome driver received was for a move to Az 227 degrees giving a 12 degree lag of the dome behind the scope.
Please excuse if I have some minor discrepancy here as I’ve written from memory and notes taken at the time. I’m sure the log file will have the facts.
I am new to domes and dome drivers, so any help much appreciated, I’ve probably set a value incorrectly in SGP’s dome settings.
Here is the SGP dome dialog:
and here’s a link to the log file.
https://drive.google.com/open?id=1HSWSX-Ljje8X6X7RpdOajGAXUse6kdyD
Many thanks for your help,
Paul